机器人上位机 RobotMonitor
项目简介

- 这是一个用于机器人监控以及控制的软件。
- 项目主要技术栈为
python+pyqt运行在树莓派平台上。 - 通过wifi模块与下位机,机器人主控进行通信和数据交互。
项目展示
- 演示视频
- 界面1
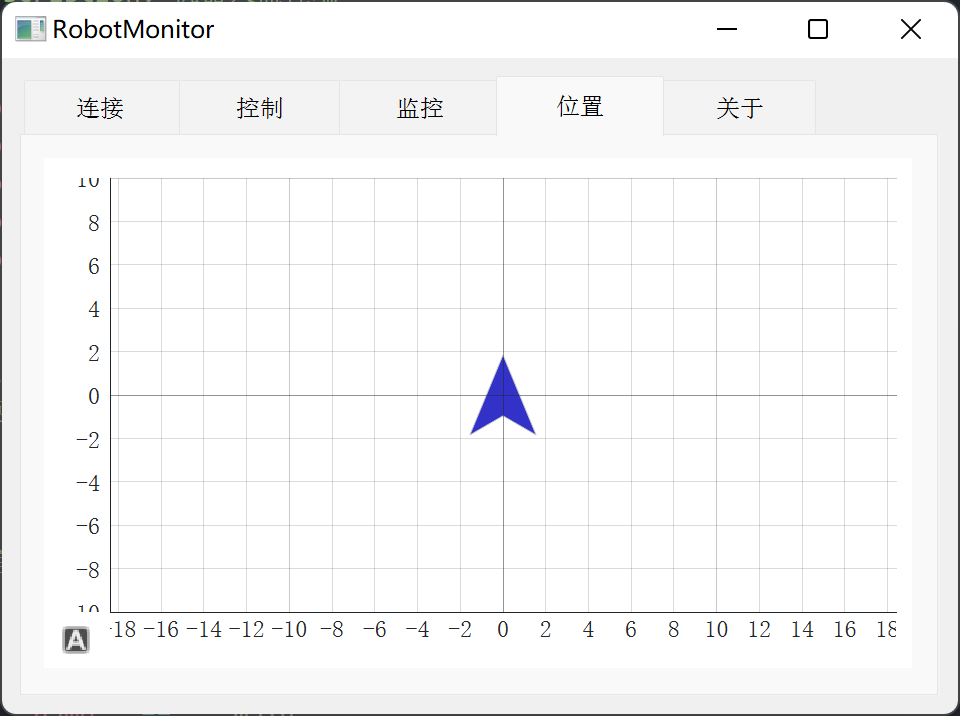
- 界面2
- 界面3


运行方法
- 首先保证你安装了 python3,我使用的版本是python3.8,使用如下命令查看Python版本
python -v
- 安装 PyQt5、pyqtgraphy、matplotlab、serial、socket、numpy、re、threading等依赖
pip install -r ./requirements.txt
- 运行
robotMonitor.py
python3 ./robotMonitor.py
自定义通信协议
一帧数据为:[消息头(2字节)][命令(2字节)] [长度(1字节)][数据(n字节,n=长度)] [校验(1字节)][消息尾(2字节)]
消息头固定为[0x55 0xaa],消息尾固定为[0x0d 0x0a]
主控发给上位机(显示)
| 消息作用 | 消息头(2字节) | 命令(2字节) | 长度(1字节) | 数据(n字节,n=长度) | 校验(1字节) | 消息尾(2字节) |
|---|---|---|---|---|---|---|
| 电压、速度 | 55 aa | 5a 5a | 10(16) | 电压、速度、里程计帧数据域 | CRC | 0d 0a |
| 里程计 | 55 aa | 5a 55 | 0c(12) | 位置x、y、航向角w | CRC | 0d 0a |
| 板载硬件状态 | 55 aa | 5a aa | 10(16) | 基本状态域 | CRC | 0d 0a |
| 激光数据 | 55 aa | 5a a5 | 10(16) | 激光数据帧数据域 | CRC | 0d 0a |
电压、速度帧数据域:
| 电压v | 线速度x | 线速度y | 角速度w |
|---|---|---|---|
| 4byte | 4byte | 4byte | 4byte |
里程计帧数据域:
| 位置x | 位置y | 航向角z |
|---|---|---|
| 4byte | 4byte | 4byte |
测试: 55 aa 5a 55 0c 3f c9 0c b2 00 00 00 01 00 00 00 01 88 0d 0a x1.5707 y ... z...
板载硬件状态帧数据域:
| 底盘电源状态 | 底盘模式 | 红点激光状态 | 底盘速度限制比例 | ... | ... | ... | ... |
|---|---|---|---|---|---|---|---|
| 1byte | 1byte | 1byte | 1byte | 1byte | 1byte | 1byte | 1byte |
| .. | .. | .. | .. | ... | ... | ... | ... |
|---|---|---|---|---|---|---|---|
| 1byte | 1byte | 1byte | 1byte | 1byte | 1byte | 1byte | 1byte |
激光数据帧数据域:
| 激光1 | 激光2 | 激光3 | 激光4 | ... |
|---|---|---|---|---|
| 4byte | 4byte | 4byte | 4byte | ... |
上位机发给主控(控制)
| 消息作用 | 消息头(2字节) | 命令(2字节) | 长度(字节) | 数据(n字节,n=长度) | 校验(1字节) | 消息尾(2字节) |
|---|---|---|---|---|---|---|
| 速度控制 | 55 aa | 55 aa | 14(20) | 速度控制指令数据域 | CRC | 0d 0a |
| 控制按键 | 55 aa | 55 cc | 1(1) | 按键/数值域-00 | CRC | 0d 0a |
速度控制指令数据域:
| 线速度x设定 | 线速度y设定 | 角速度w设定 | 航向角设定 |
|---|---|---|---|
| 4byte | 4byte | 4byte | 4byte |
速度控制指令数据域:
| 项目 | 数据 | 取值 |
|---|---|---|
| 红点激光 | 0x01 | 0/1 |
| ... | ... | ... |