ROS机器人平台 Icar
- 图片1
- 图片2
- 图片3
- 视频
- 3D模型


项目介绍
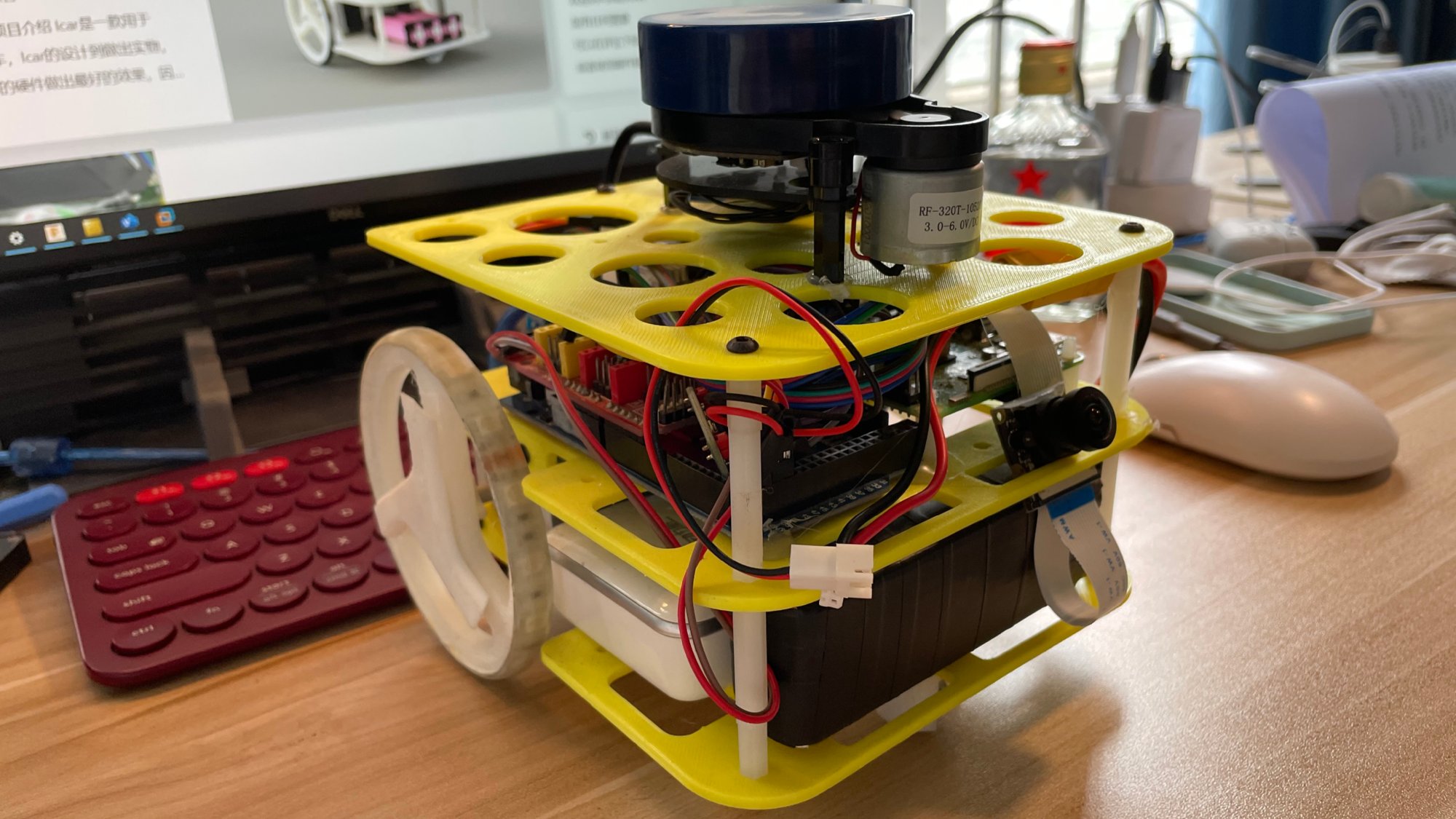
Icar是一款用于ROS学习的低成本高性能双轮差速小车,Icar的设计到做出实物,遵循着性价比的原则,使用最低成本的硬件做出最好的效果,因此,电机选用了两个42步进电机 ,实现高精度的电机运动以及里程计反馈,机身材料全部采用3D打印PLA材质,螺栓均采用塑料尼龙六角柱,底层直接使用Arduino RosSerial与树莓派通信,相比串口发送,更简洁、代码量更少。主控使用树莓派3B/3B+/4 ,运行基于 Raspbian 的 Ros Kinetic ,雷达可搭载思岚的rpdiar a1,或者Robotics的LDS。当前支持手柄 PS3/XBOX360/LeTv ,支持一般的USB摄像头以及微软Kinetic、乐视(奥比中光)astra pro。
与ICAR相关的仓库
icar:icar机器人ros基础功能包
icar_multi:icar多机编队ros功能包
icar_base:icar下位机程序(arduino mega2560)
icar_manufacture:icar本体制造相关文件(结构、相关硬件)
可能用到的包
ros-drivers/joystick_drivers: ROS drivers for joysticks (github.com)
https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git
详情介绍
详细的硬件参数表如下:
| 元件 | 型号 | 说明 |
|---|---|---|
| 主控 | 树莓派3B/3B+/4 | Raspbian + Ros Kinetic |
| 下位机 | STM32C8T6核心板 | Rosserial 通信 驱动传感器与电机 |
| 电机 | 42步进电机 | 常规42步进电机即可 |
| 电机驱动 | SmartDrive-Stepper | 详情请参见该项目的说明 |
| 陀螺仪 | mpu6050 | 直接使用陀螺仪模块GY521 |
| 超声波传感器 | HCSR04 | 可挂载最多8路 |
| 激光雷达 | rpdiar a1/LDS | 性价比极高的激光雷达 |
| 摄像头 | USB摄像头/Kinetic/乐视astra pro | 乐视(奥比中光)astra pro性价比极高 |
| 手柄 | PS3/XBOX360/LeTv | 乐视游戏手柄性价比极高 |
项目视频
Icar-Navigation仿真
Gmapping SLAM 乐视手柄
Opencv人脸识 Astra pro深度相机
在计算机中仿真
启动仿真环境
roslaunch icar_gazebo icar_gazebo.launch
SLAM Demo
roslaunch icar_slam gmapping_demo.launch
Navigation Demo
roslaunch icar_navigation nav_demo.launch
手动控制
roslaunch icar_teleop keyboard_teleop.launch
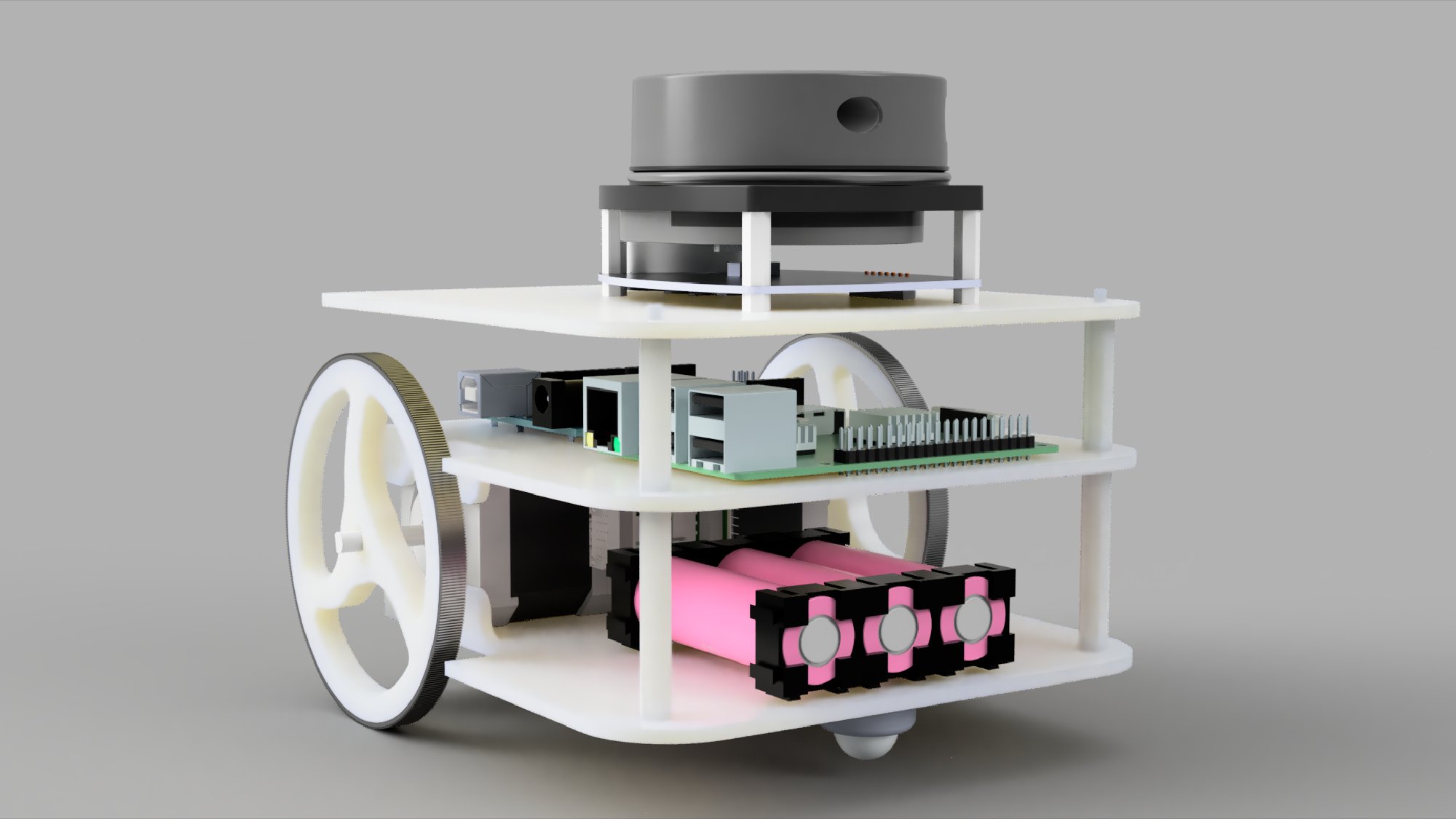
车体设计渲染图
系统环境
ubuntu16.04 + ros-kinetic-desktop
树莓派3 (ubuntu16.04 + ros-kinetic-desktop)