迷你循线机器人 MazeBot
项目展示
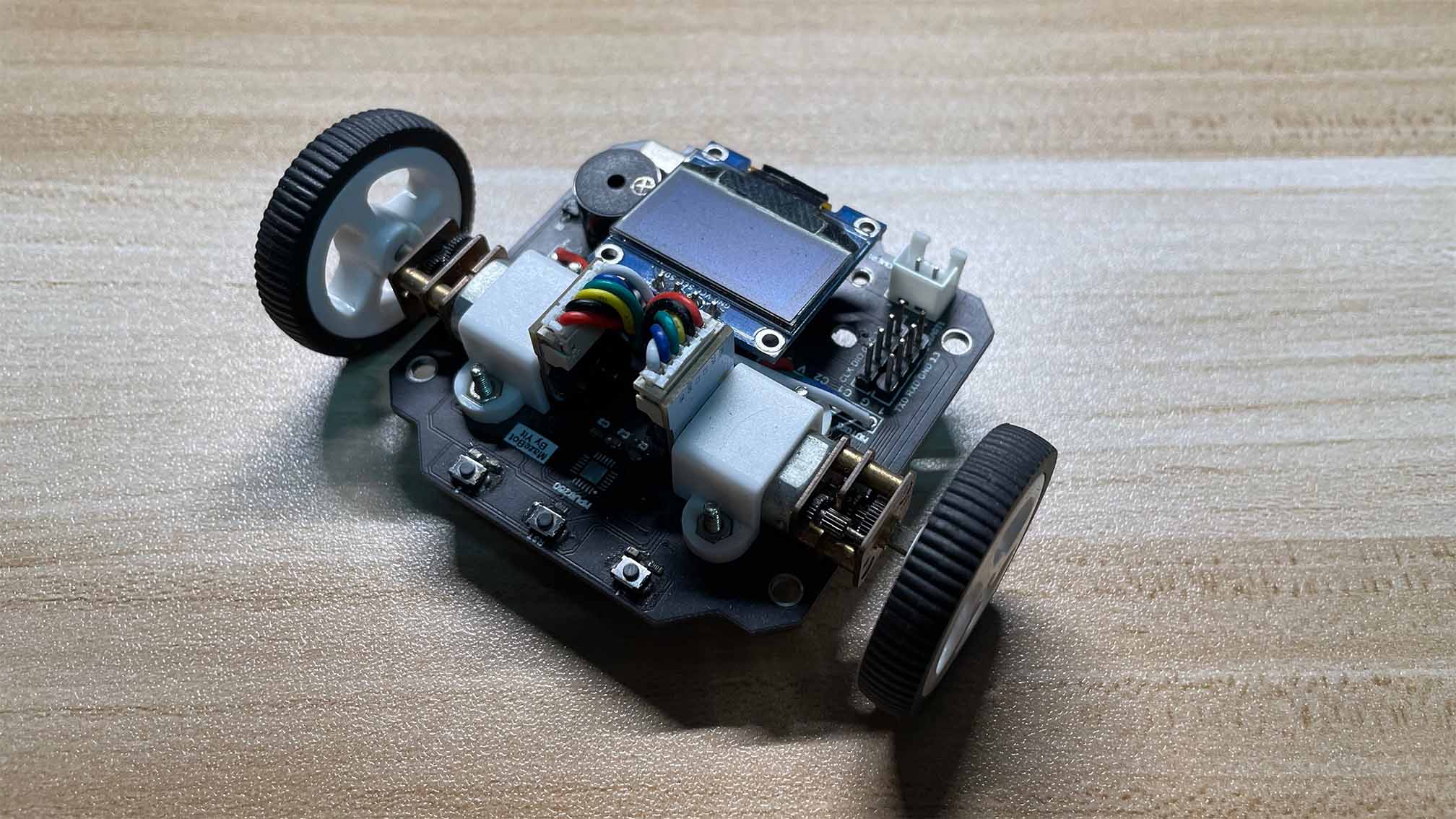
- 实物
- 实物视频
- 仿真视频
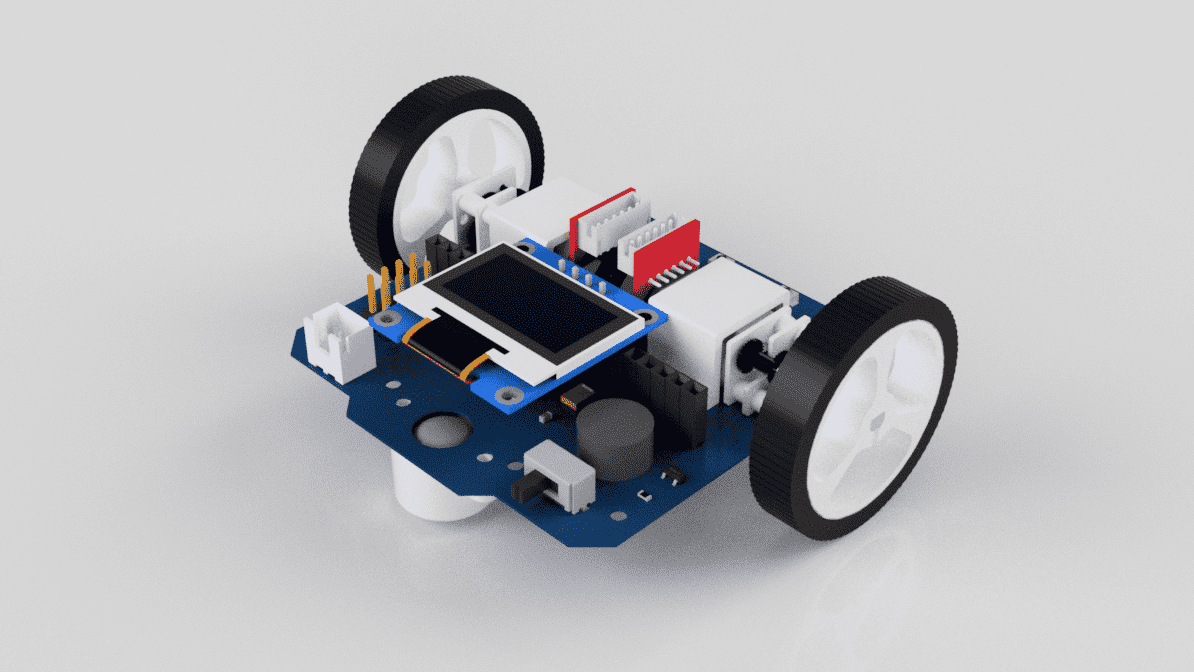
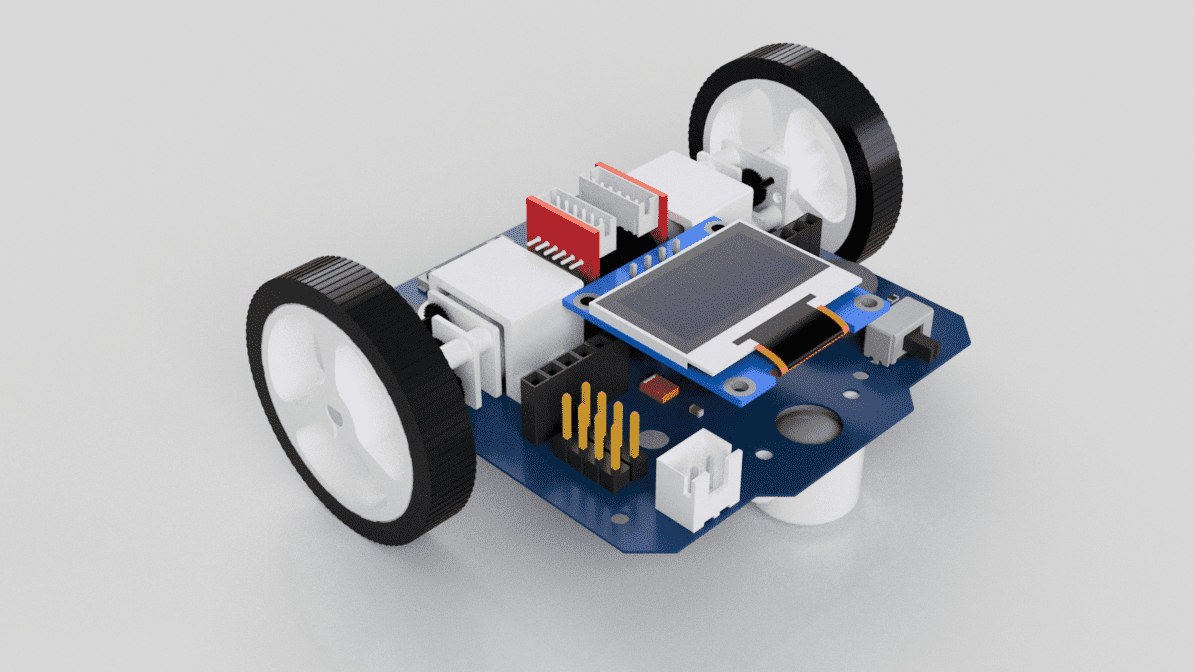
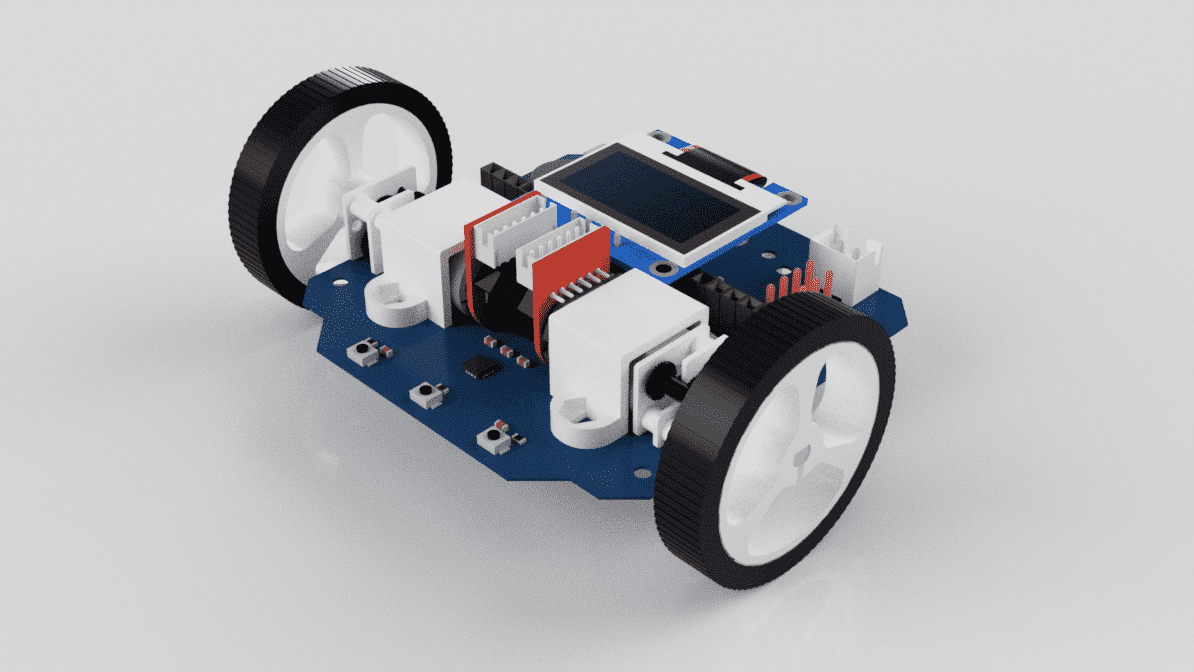
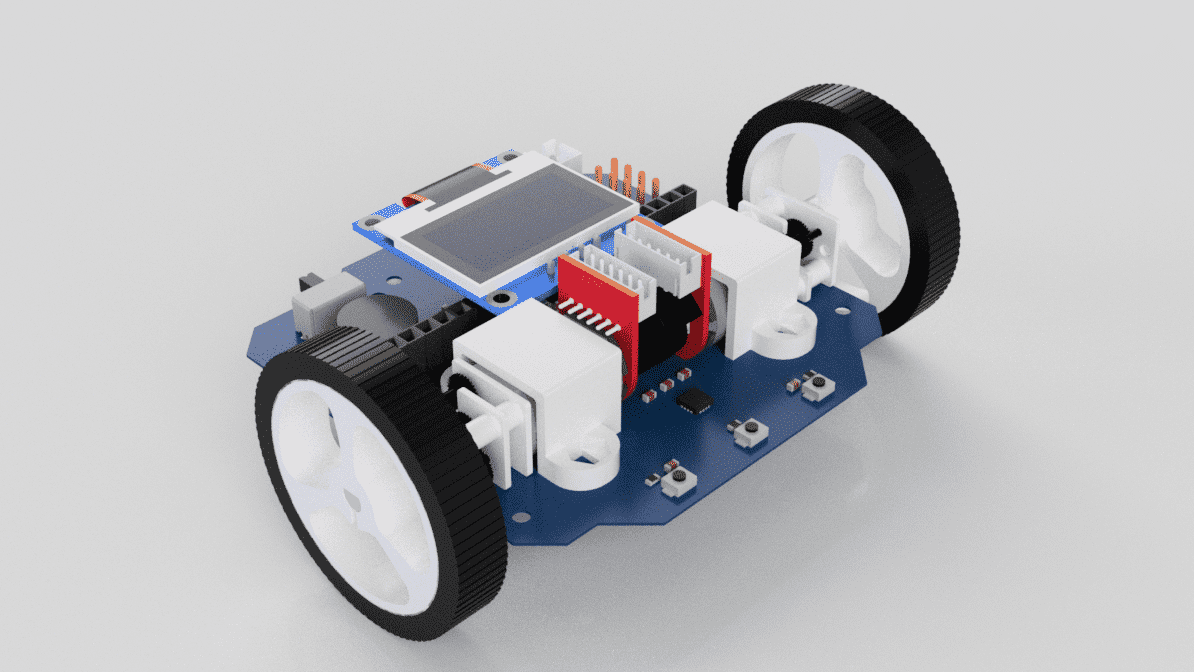
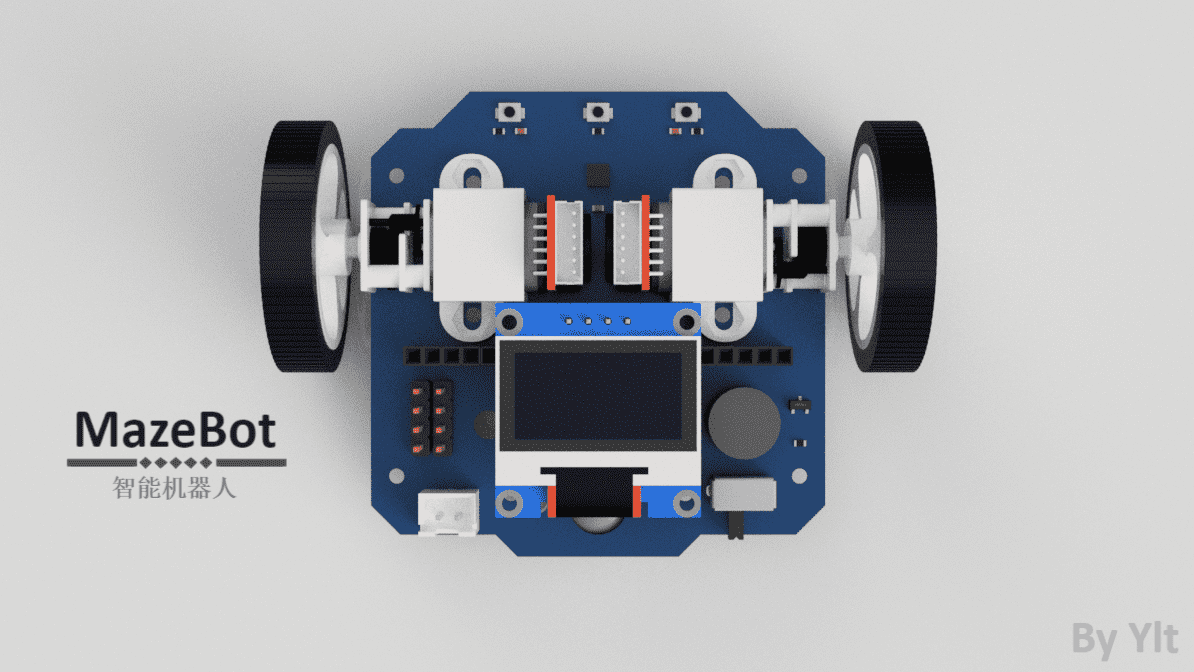
- 3D模型
简介
📖 本项目更新于 2020 年 08 月 12 日
MazeBot 始于2020年四月份,作为一个机器人研究者和爱好者,希望有一个硬件作为载体满足自己的软件的实验。
硬件资源
| 元件 | 型号 | 说明 |
|---|---|---|
| 处理器 | STM32F405RGT6 | 160MHZ主频 DSP浮点加速 |
| 驱动器 | TB6612 | 双路直流电机驱动器 |
| 通讯 | ESP07S | 安信可WiFi芯片 |
| 电机 | N20 | 带正交编码器的直流有刷减速电机 |
| 陀螺仪 | mpu9250 | invensense的9轴姿态传感器 |
| 光电传感器 | ITR8307 | 收发一体的反射式光电传感器 |
| 显示器 | 0.96oled | SSD1306白黑oled |
功能与进展
MazeBot能够用来干什么呢:
- 首先作为一个双轮差速的小车,能够提供最高1m/s的移动速度;
- 通过直流电机编码器反馈与mpu9250陀螺仪信息融合获得可靠的里程计信息;
- 前置五个光电传感器实现巡线学习;
- oled与三个操作按键进行人机交互;
- WiFi与上位机相连获取信息与控制;
我准备MazeBot做什么:
- 使用OPEN AI 训练其进行巡线;
- 使用模型优化轨迹跟踪算法的参数;
现在MazeBot完成了哪些部分:
- 电机速度闭环与位置闭环;
- 陀螺仪读取与矫正;
- 基于编码器与陀螺仪的里程计;
- Wifi AP模式和Station模式与上位机通信;
- 光电传感器对白线与黑线的识别;
- 轨迹规划与跟踪算法;
原理图、PCB与Bom
渲染图