双轮平衡机器人 BalanceXE
项目展示
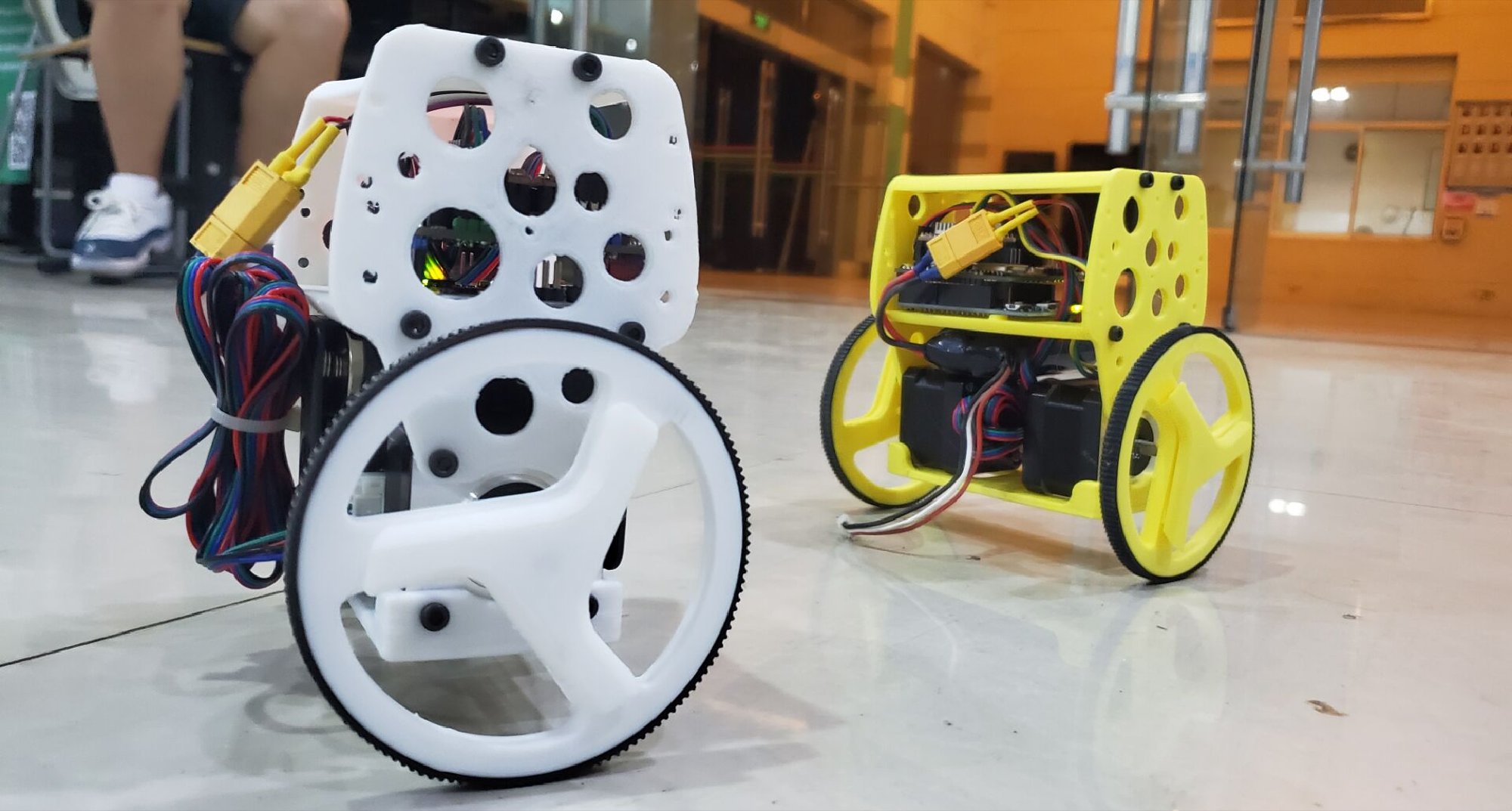
- 实物
- 视频1
- 视频2
- 3D模型
简介
这是一个基于Arduino Leonardo 和 WiFi 的平衡机器人
基本功能:
- 安卓手机app 连接小车热点控制
- 机器人前后左右各方向的行走
- 舵机手臂将倒下的机器人撑起
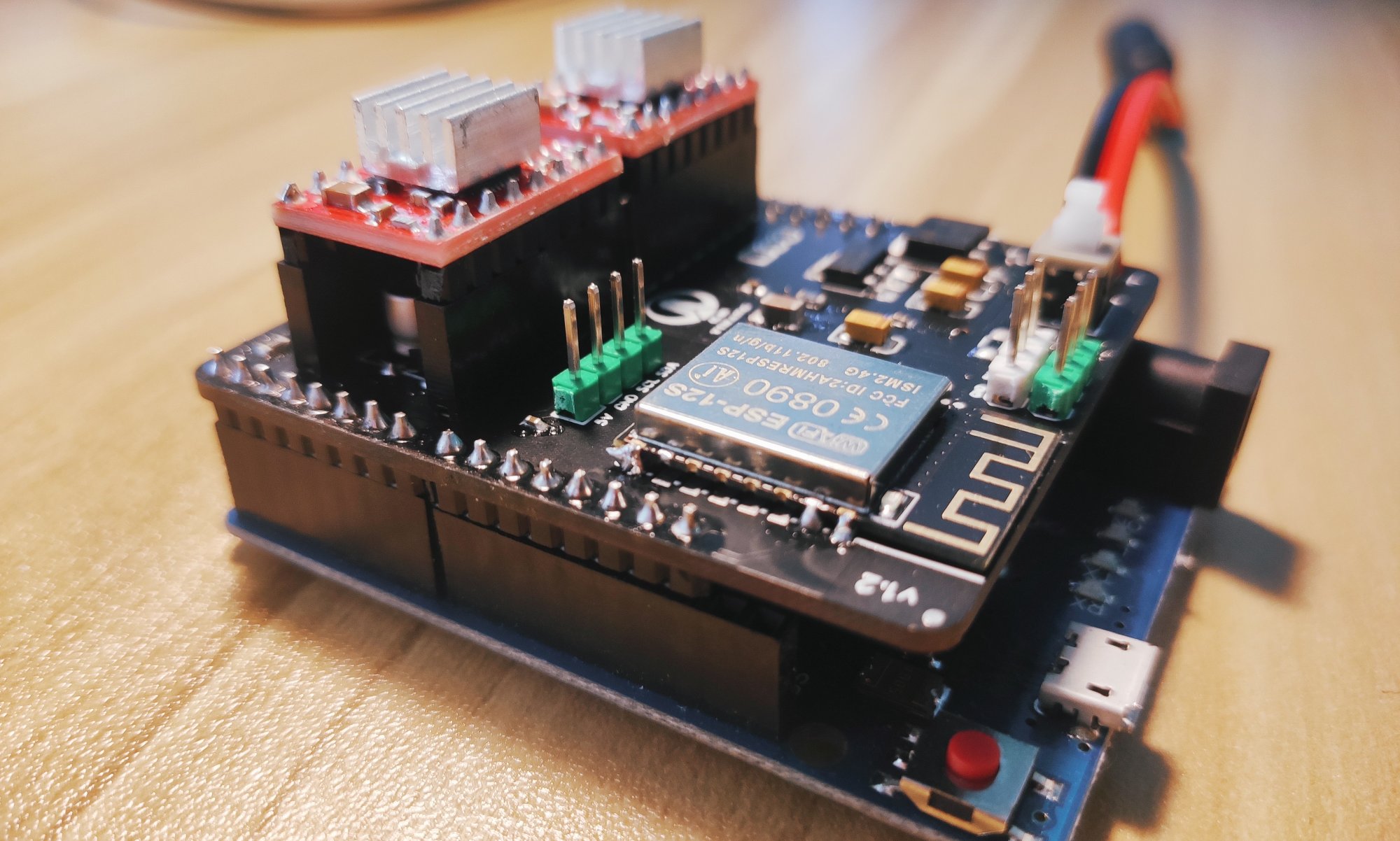
控制器V1
交互式BOM
图片
控制系统清单
| 名称 | 说明 | 数量 |
|---|---|---|
| Arduino Leonardo | Leonardo | 1 |
| 驱动扩展板 | 开源项目中包含 | 1 |
| 锂电池 | 3s-11.1v 18650 | 1 |
| 步进电机驱动 | A4988 | 2 |
| 步进电机 | 42步进电机 | 2 |
| 陀螺仪 | GY521模块 | 1 |
| 舵机 | MG90 | 1 |
- Arduino Leonardo 在市面上能够直接购买。
- 驱动扩展板包含在开源文件中 需要自制。
- 推荐使用3s-11.1v的电池,2s-7.4v的电池也可以运行。
第一代的局限性:
控制板的体积比较大是我一直想解决的问题,陀螺仪需要单独用杜邦线链接而不是直接插在主控板上
因为你arduino的引脚资源有限,没有超声波测距,没有显示屏,没有蜂鸣器
让我产生了创造第二代的想法
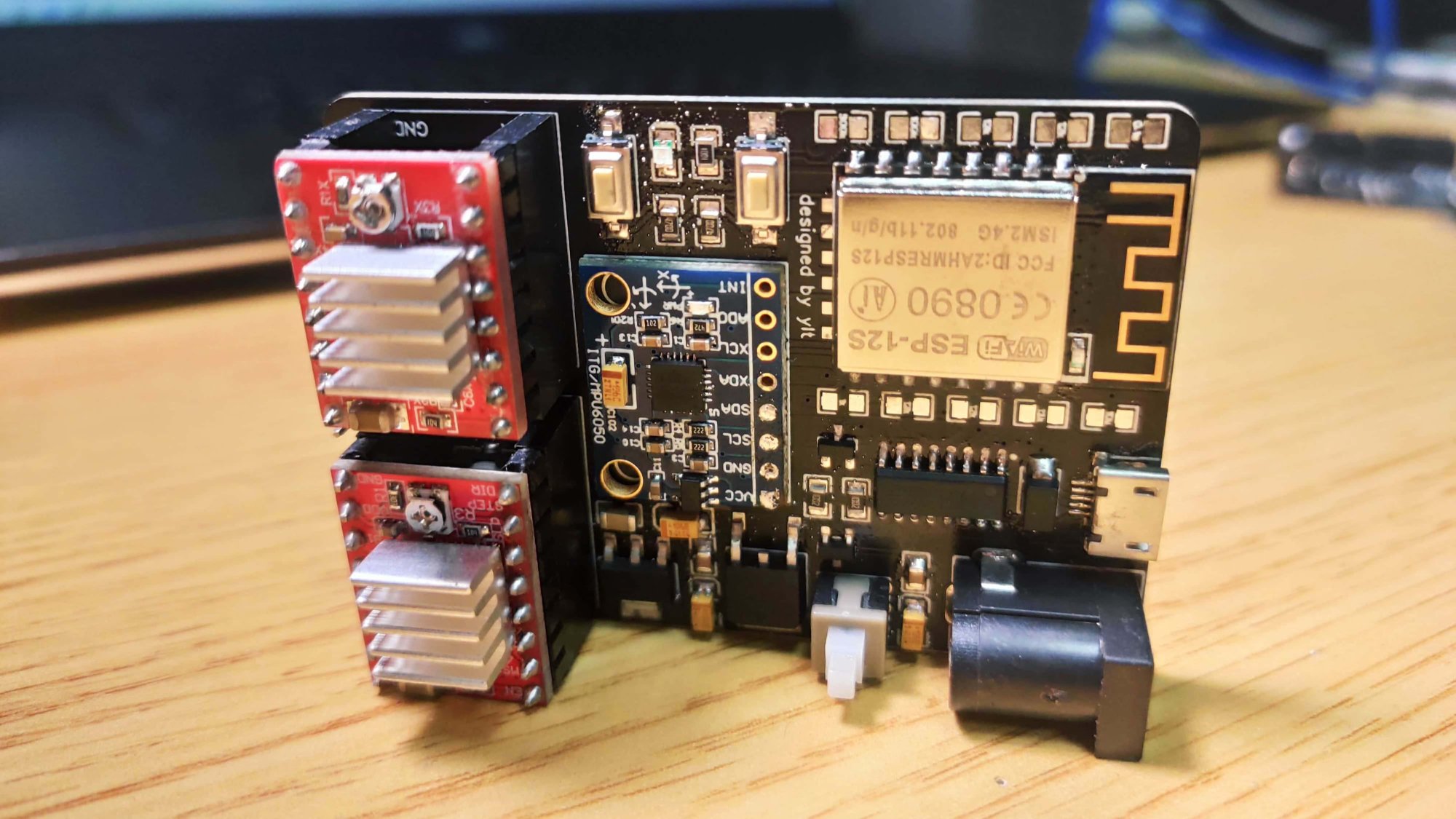
控制器V2
BOM
介绍
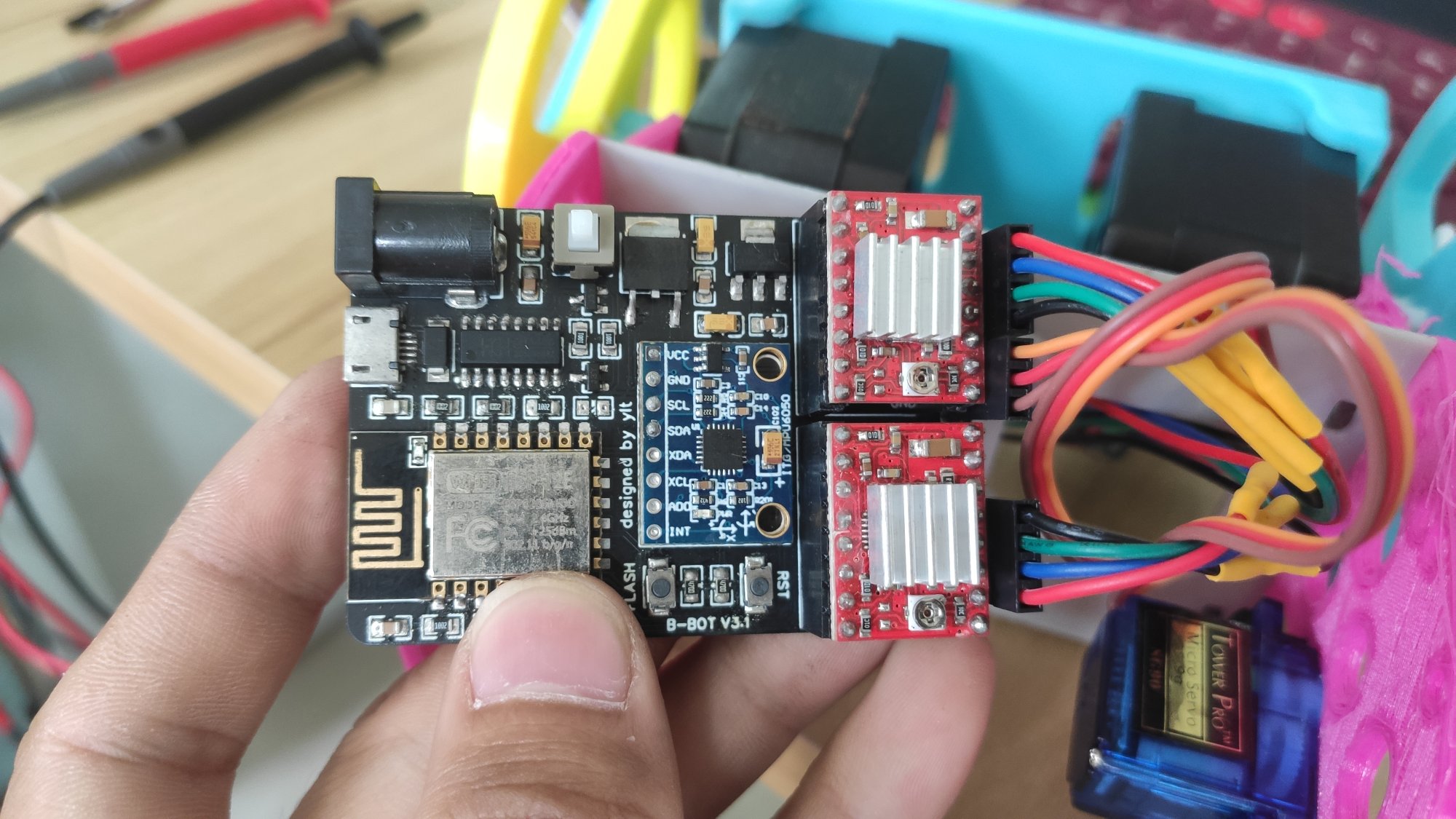
esp12版本使用一个wifi芯片 集成了WiFi,运动处理,使用arduino编程,并且在这个板子上为esp12加入了usb串口转ttl,完整的一键下载电路,在板子中央集成了GY521陀螺仪,并且在后方保留了两路舵机接口,真正的ALL IN ONE。
v2版本图
装机效果:
电池及充电器
我自制的18650 2s-7.4v 电池组,使用两节18650 或者三节18650都可以 ,记得要加上充放电保护板,充电器用9v或者12v的都行,也可以直接到网上买成品电池,放电倍率一定要大。
上位机与APP
- WiFi控制,手机APP灵敏度很好
- APP上可以实时查看电量,控制手部的舵机
- 就算倒在地上,也可以把自己撑起来
- 软件上支持实时PID调参,你可以调出出自己想要的效果
- 两种模式,一种普通模式,一种PRO模式,不同的PID效果也很不相同
- 支持GOOGOLE BlockLY图形化编程,也就是使用电脑 连接 BB机器人 创建的WIFI之后打开BlockLY,进行拖拽编程即可控制机器人按照 预定轨迹行走,其中内置了几个函数,可以控制油门,转向速度,舵机角度,模式选择,还有延时函数,通过脉冲计算做一个初略的位置闭环。
总结与致谢
以上基本就是第一代车的功能 除了手机app控制之外,还可以用电脑编程,让他自己定时完成某个任务 在上面装一个摄像头,就可以给隔壁办公室的小伙伴端茶送水,如果有多台的话 可以约几个小伙伴一起竞速、对战。
折腾永无止境,我还会继续优化更新该项目
- 该项目的原型是国外一家叫做 JJROBOTS公司 的开源机器人 B-ROBOT_EVO2
- 他们本身的平衡性能做的是非常优秀的,因为我沿用了他们的3d打印外观、基本的程序框架,但是在他们开源的文件中并没有开源和程序匹配的电路文件,需要买他们的机器人拓展版。
- 重新设计了PCB,兼容开源部分的程序,并且替换了ESP12芯片,使用最新的ESP12S。